Charlie Guan
Engineering Manager - Autonomous Vehices - Oxa
Experience
Engineering Manager, Behavior and Action Reasoning
Manage team responsible for planning algorithms for industrial autonomous vehicles.

Research Scientist, Autonomous Vehicles
Develop planning and prediction algorithms for autonomous vehicles.
Software Engineer, Autonomous Systems
Develop and implment advanced robotic algorithms for reasoning about complex scenes by real-time systems.
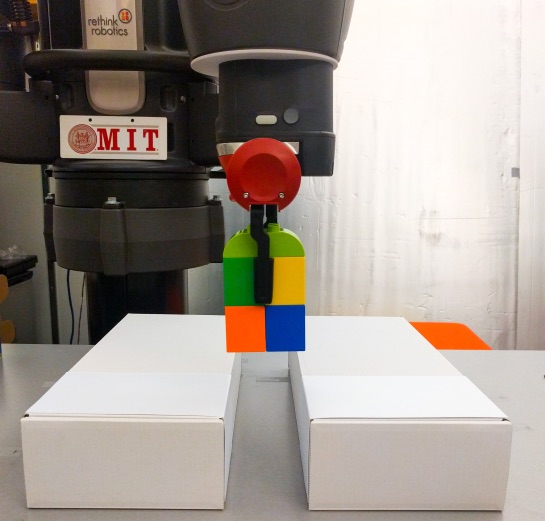
Efficient Planning for Near-optimal Manipulation Leveraging Environmental Contact
The motion of inexpensive robots is noisy and not precise enough for tight-tolerance assembly tasks. We develop an algorithm to achieve high precision by leveraging environmental contact. Published at the International Conference on Robotics and Automation (ICRA) 2018. Download PDF

Low-cost Self-driving Wheelchair
Powered wheelchairs are often difficult to operate for its target audience, due to other associated disabilities. We develop a fully-autonomous wheelchair capable of robustly navigating indoor environments based on the Robot Operating System. Download PDF

Systems Engineering Intern
Managed technical specifications and deliverables for development of rugged, enterprise-grade mobile computers. Fast-paced, collaborative engineering development environment.
Education

Massachusetts Institute of Technology
Thesis advisor: Prof. Nicholas Roy

University of Toronto
Thesis advisor: Prof. Jonathan Kelly
Community/Fun Projects
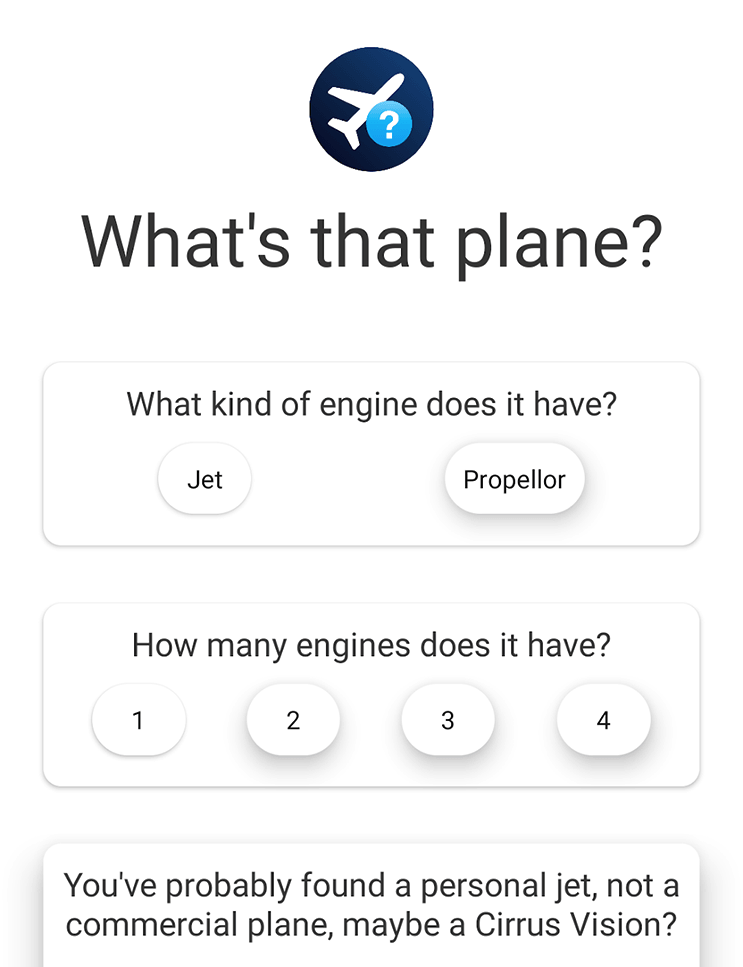
What's that plane?
Developed app to help identify commercial passenger aircraft through answering simple questions. Written in JS using React Native.

Vice-president of Information
Managed 13-person team to maintain website and other technical infrastructure of largest graduate student residence in the US. Worked closely with executive team, organized 60+ persons retreats, and other events.
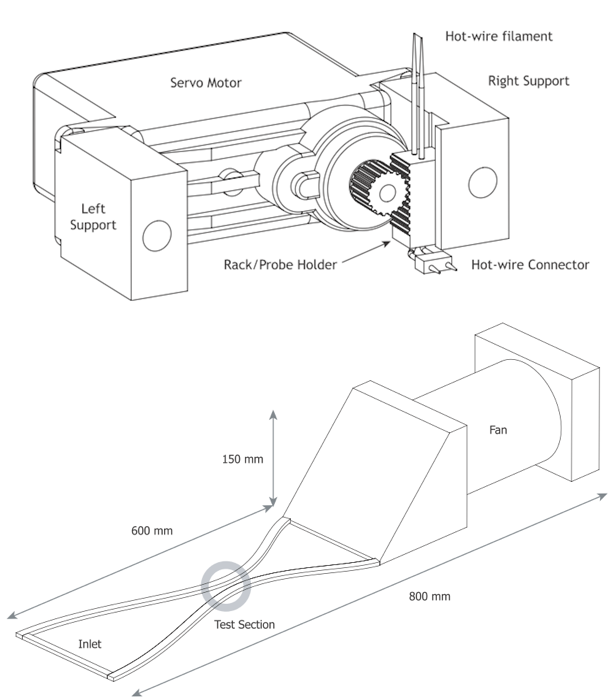
Retractable Miniature Hot-wire Anemometer
Designed, built, and tested miniature retractable airspeed sensor for characterisation of laminar flow control using dielectric barrier discharge devices. Programmed in LabVIEW, tested using custom-built in-situ mini wind tunnel, flown in fall 2013.
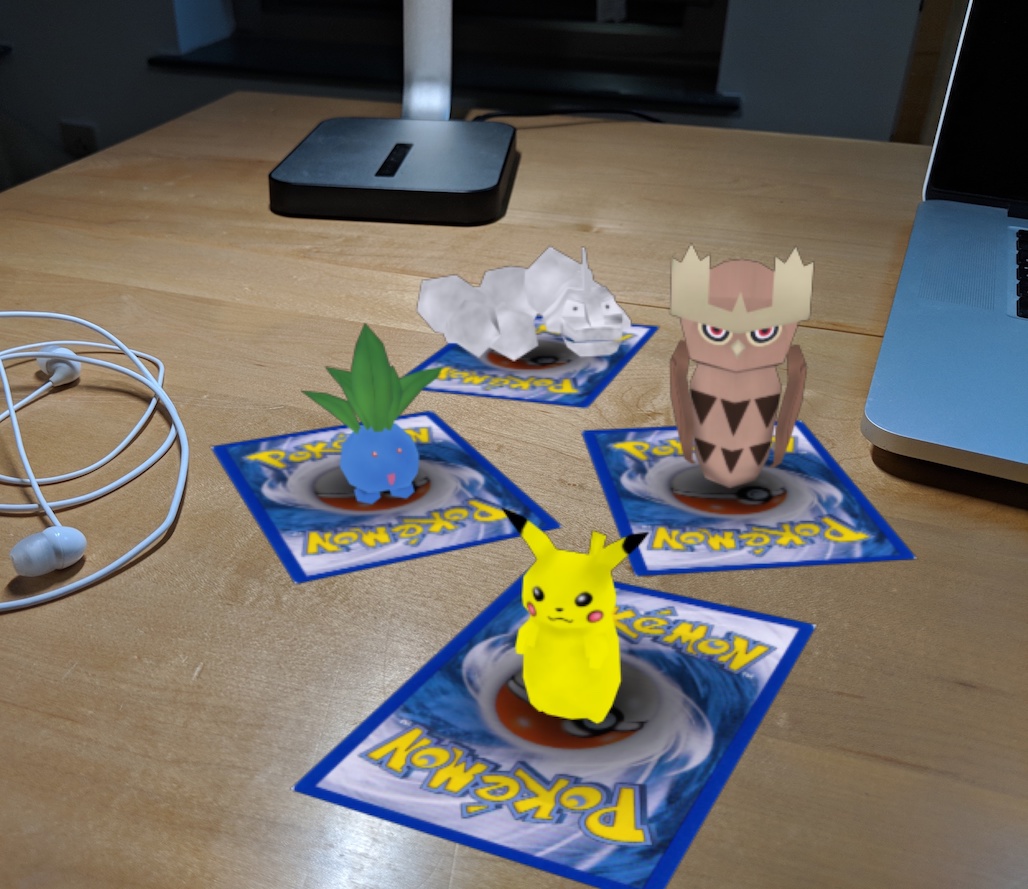
Augmented Reality Pokemon
Designed, modelled, and animated Pokemon figures, set up QR tag tracking code and demo in Adobe Flash.
Skills
- Continuous integration and deployment, Openstack, Linux
- Strong technical communication skills
- Graphic design (Photoshop, Illustrator) and video editing (Aftereffects)
- 3D modelling and animation (3ds MAX, Inventor)
- Matlab, LabVIEW, other scientific computing packages.